


 卫星及载荷制造
卫星及载荷制造

 火箭制造与发射
火箭制造与发射

 地面终端与设施
地面终端与设施

 材料与电子元器件
材料与电子元器件

 卫星应用服务
卫星应用服务

 试验、检测及其他服务
试验、检测及其他服务

 系统软件与数据
系统软件与数据

 配套工具与设备
配套工具与设备

COSATS 6U 半实物仿真系统简介
6U 半实物仿真系统是用于 6U 立方星半实物仿真的平台系统,实现立方星 单机控制功能、姿态控制功能、对日定向功能、拍照功能和帆板展开等功能。
COSATS 6U 半实物仿真系统组成
包括 6U 半实物仿真星(简称“工程星”)、上位机软件控制系统、WIFI 通 信系统、地面支持系统。
l 6U 半实物仿真星:6U 半实物仿真星主要由各个单机和结构框架组成,单机主 要包括星载计算机、太阳敏感器、飞轮、GNSS 接收机、测控通信机、电源控制 器、太阳能板、相机+数传;
l 上位机软件控制系统:上位机软件通过 WIFI 通信和工程星进行数据交互,能 够将工程星上传的遥测数据进行解析显示,能够对工程星下发指令进行控制,如 拍照、帆板展开、对日定向、姿控等动作,并且能将工程星上的关键数据进行可视化显示;
l WIFI 通信系统:该系统会配备一个 WIFI 路由器以提供通信支持;
l 地面支持系统:工程星在地面仿真运行时,需要微重力环境支持,地面支持系统,通过一套单轴气浮台设备实现 微重力环境。
COSATS 6U 半实物仿系统技术参数
l 6U 半实物仿真工程星:
包络:340.5±2mm×278±2mm×107.4±2mm(展开帆板),236±2mm×120mm×366±2mm(体装帆板);
重量:<6kg;
母线电压:8.4V;
电池组参数:8.4V / 7200mAh;
安装方向:竖向。
l 上位机软件控制系统:
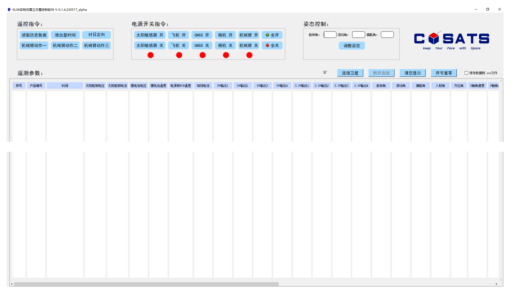
打开软件前,要先确保电脑连接上指定 WIFI,并配置好指定的 IP 地址、子网掩码、子网网关(具体见软件 操作说明)。软件能够对工程星下发指令进行控制,如拍照、帆板展开、对日定向、姿控等动作,并且能将工程 星上的关键数据进行可视化显示。
l WIFI 通信系统:通信 WIFI (2.4G);
l 地面支持系统:
气浮台载重:30Kg;
气压:0.4±0.1kpa;
包络:dia180mm±2mm×135mm±2mm;
重量: 12.3Kg。
上位机软件控制系统可视化显示
COSATS 6U 半实物仿真系统功能
l 工程星姿态控制功能:工程星能根据上位机软件命令中指定的单轴姿态角在单轴气浮台上用飞轮进行姿态调整与 稳定,使工程星单轴姿态角与目标值一致,并保持稳定。实现姿态控制功能;
l 工程星对日定向功能:工程星能根据上位机软件命令,利用太阳敏和飞轮自动调整姿态寻找指定光源,并进行光 源的定向跟踪。实现对日定向功能;
l 工程星拍照功能:工程星能根据上位机软件命令控制相机开始拍照或者录制视频,相机和数传为一体,上位机通 过 WIFI 和相机连接后,相机会自动将照片或者视频实时上传给上位机软件。实现拍照/视频功能;
l 工程星分系统单机遥控功能:工程星支持软、硬件联合仿真,可以接收上位机软件命令,对工程星中的每个单机 进行配电、遥测、遥控以实现对每个单机的上下电、运行、数据获取等控制操作。实现分系统单机遥控功能。