


 卫星及载荷制造
卫星及载荷制造

 火箭制造与发射
火箭制造与发射

 地面终端与设施
地面终端与设施

 材料与电子元器件
材料与电子元器件

 卫星应用服务
卫星应用服务

 试验、检测及其他服务
试验、检测及其他服务

 系统软件与数据
系统软件与数据

 配套工具与设备
配套工具与设备

实时拟真 3D 环境
• 融合真实地理坐标系统与高精度地景数据库,精准定位每一处地点,同时凭借丰富且精细的地景数据,全方位还原现实世界地貌、景观等要素,使虚拟环境更贴合实际。
真实物理的飞行体验
• 基于真实飞行动力学模型仿真,支持多种空气动力学模型,支持重力、风力风向、碰撞检测等物理交互仿真,可根据不同气候、季节等工况模拟真实电池或燃油的续航。
硬件在环仿真
• 硬件直接与虚拟环境互动,基于实机运行评估模型与算法的性能和稳定性,支持故障注入,仿真度高达 99%,大幅降低测试验证成本,提前发现潜在问题。
全要素无人作业模拟
• 支持自定义创建任务场地,在虚拟场地内进行单机飞行训练与多机型任务协同,支持多台飞控多种不同机型同时接入,并提供全流程回溯复盘。
上天入地穿云踏浪 支持各型无人载具
预置 12 款无人飞行器、无人车、无人船模型,支持用户自定义模型导入

高精度三维数字实景
融合真实地理坐标系统与高精度地景数据库,精准定位每一处地点,全方位还原现实世界地貌、景观等要素,使虚拟环境更贴合实际

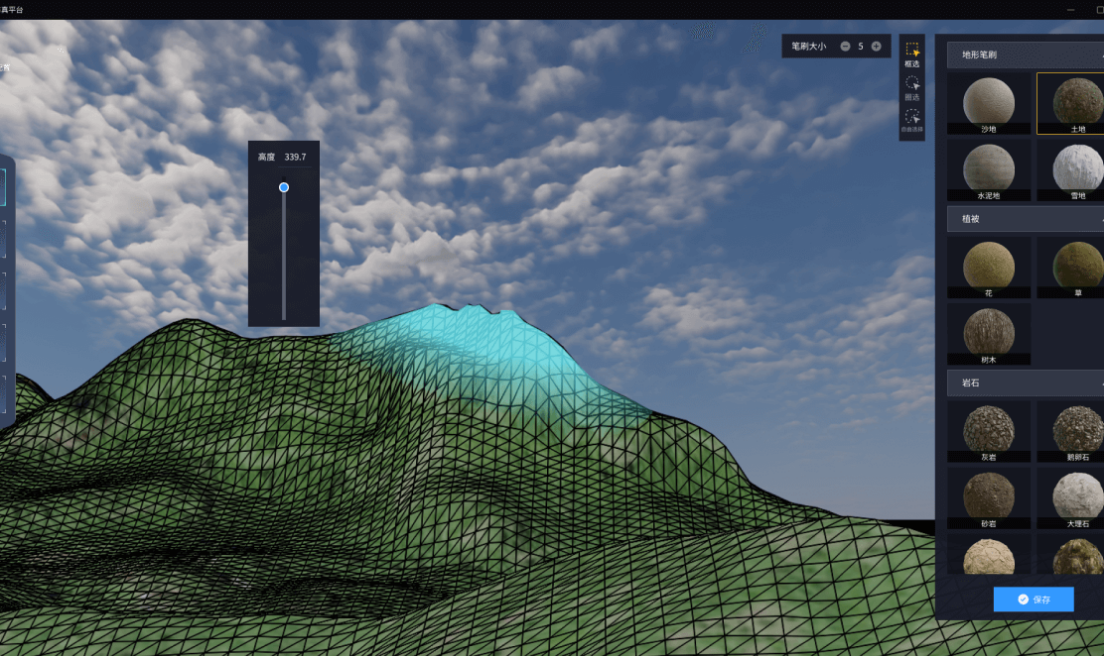
地形仿真
不仅能依托现有地图数据精准还原真实地形,还支持地形的编辑与定制,灵活满足不同需求。
离线地图
提供离线地图功能,无网络时仍可使用,用户只需导入地图数据即可轻松启用,操作简单且适用性强。
气候仿真
全面覆盖风速、湍流等气象要素,还可模拟时间变化、雨雪等复杂天气,提供全天候仿真支持。
时间仿真
与真实世界时间一致,保证传感器输入输出延迟与实际情况匹配,实现虚拟环境与现实时间无缝对接。
真实的物理引擎 交互精准反馈
通过精准还原物理原理与现象,打造高度贴合现实的飞行体验
真实飞行动力学模型仿真,支持多种空气动力学模型。
支持重力、风力风向、碰撞检测等物理交互仿真。
根据不同气候、季节等飞行工况模拟真实电池或燃油的续航。

丰富全面的环境气象仿真
风、雨、雾、云按需创建多级可调,全方位验证气动性能与识别追踪算法
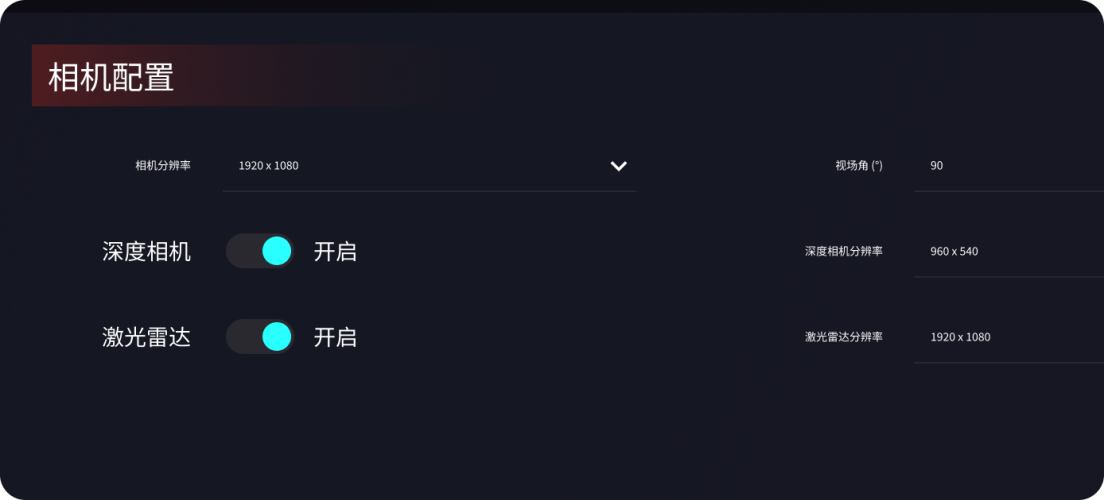
光电吊舱与传感器模拟
多种光学吊舱模拟
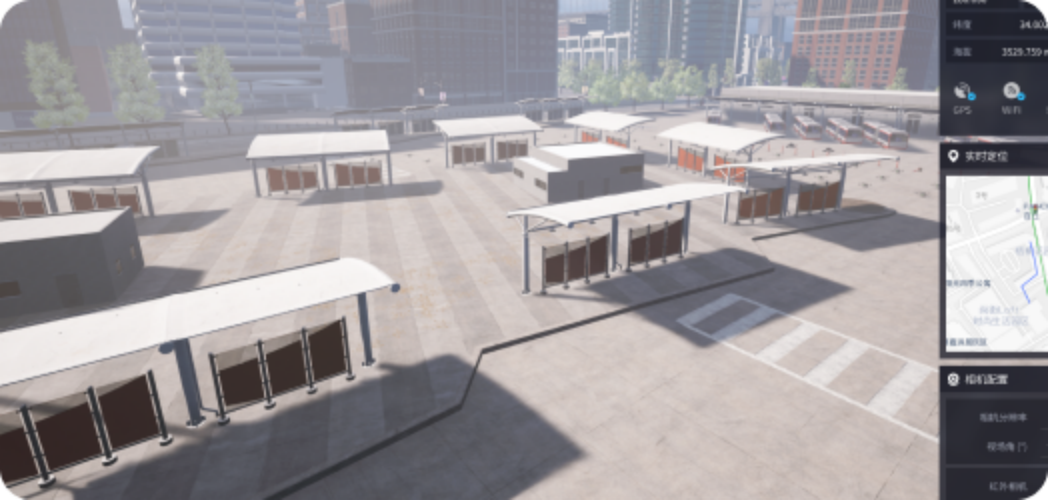
• 可见光相机
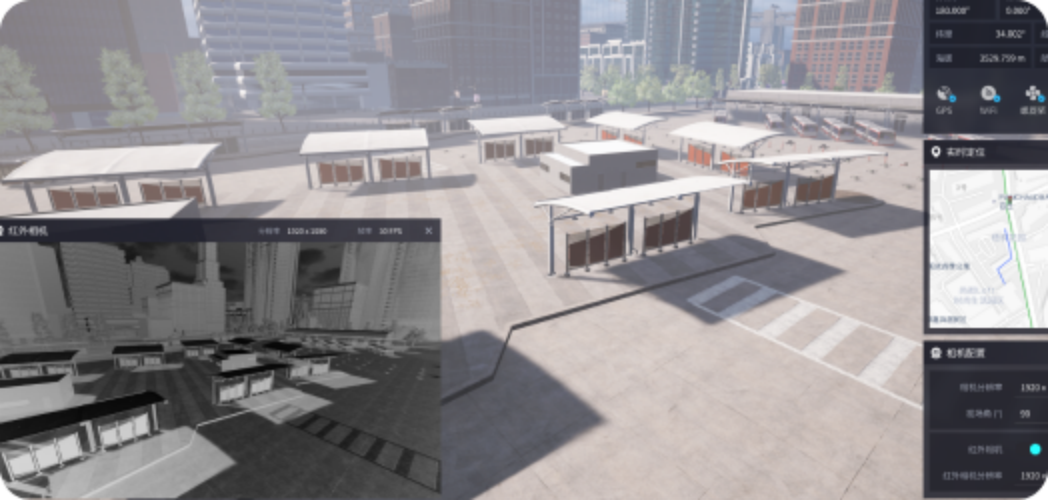
• 红外相机
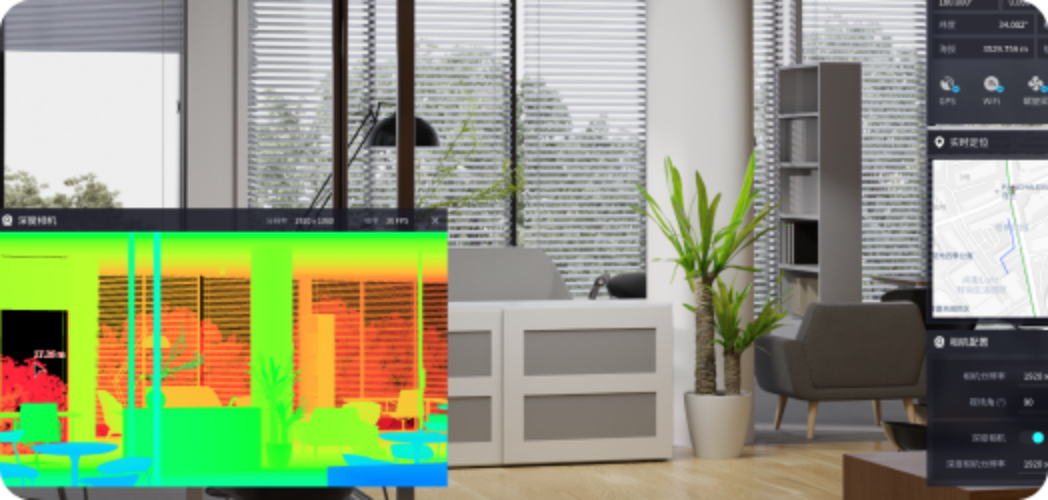
• 深度相机
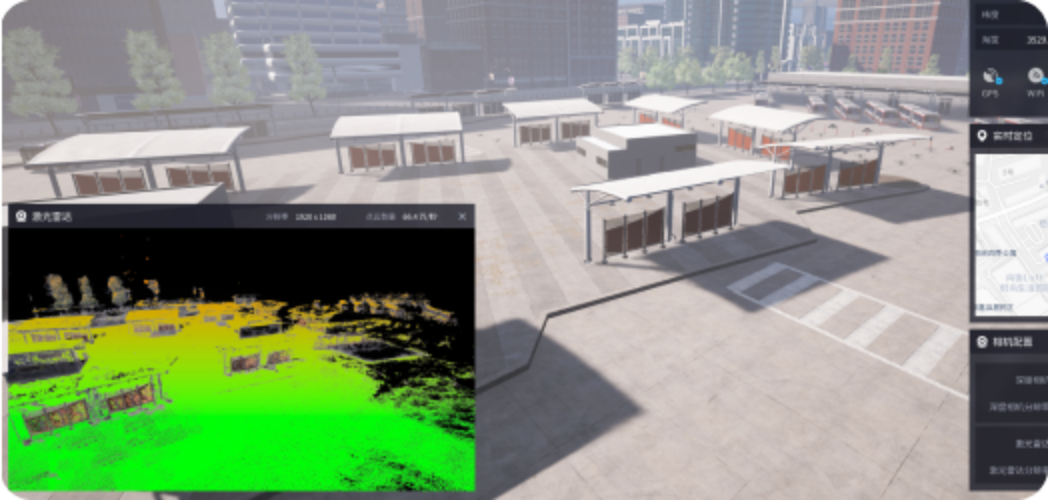
• 激光雷达
相机自定义配置
根据实际光学参数在模型中进行准确配置,使虚拟光电吊舱在图像采集、目标探测等光学功能表现上与实际设备相符。
光学参数精确设置、三档分辨率可调、云台运动控制模拟、数据与接口映射
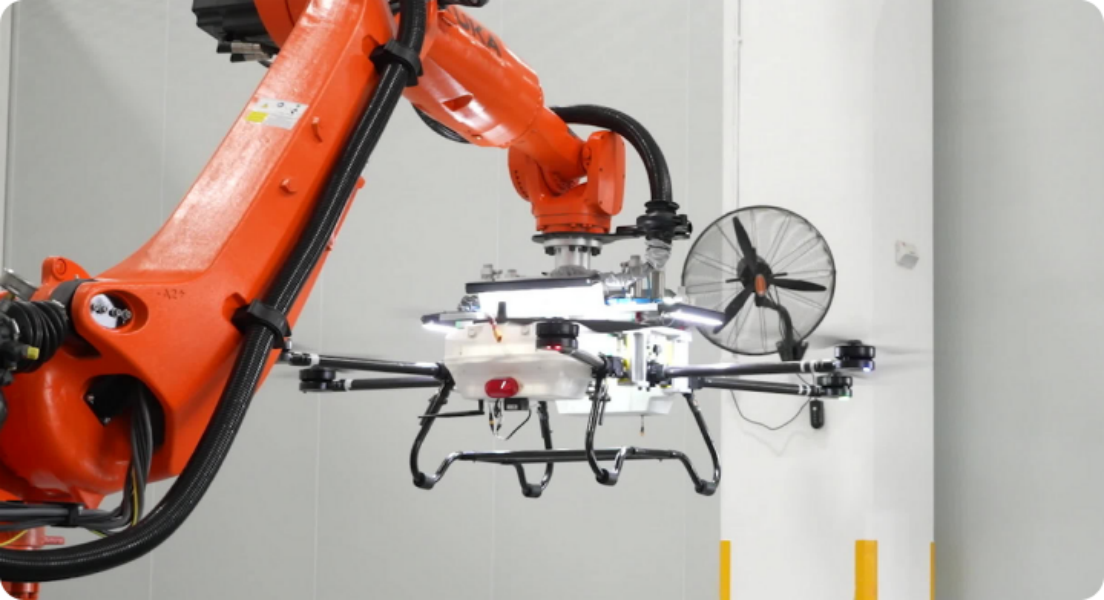
硬件在环 全要素测试验证
仿真度高达 99%,能够精准模拟硬件运行状态,真实还原测试场景
可避免高成本的真实测试环境搭建,减少设备采购费用,同时确保测试准确性,显著降低测试验证成本
算法实机运行,效果实机检验
支持多台不同机型接入同一仿真环境
支持传感器、执行器等各类故障注入

对比传统验证方式
实机测试
软件测试依赖真机生产,而真机本身存在诸多不可控风险,如设备故障、意外损坏等。此外,场地租赁费用颇高,高峰期还需要排队预约。
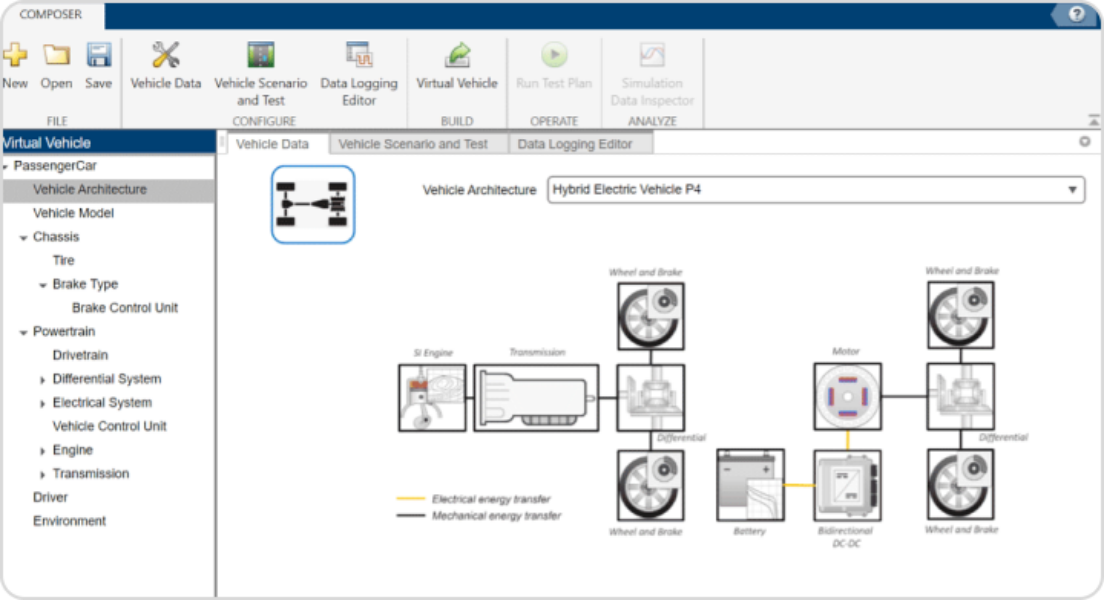
软件仿真
基于 MATLAB 等工具的软件仿真主要用于验证算法逻辑,难以还原真机运行效果,像真机的物理交互、实时响应等都难以体现。
数据(2D)仿真
呈现形式单一、可视化程度低,难以直观展示飞行器姿态变化和飞行过程中的动态细节,不利于全面评估飞行效果。
任务模拟与复盘评估
支持自定义创建任务场地,在虚拟场地内进行单机飞行训练与多机型任务协同
支持多台飞控多种不同机型同时接入,并提供全流程回溯复盘与数据分析工具
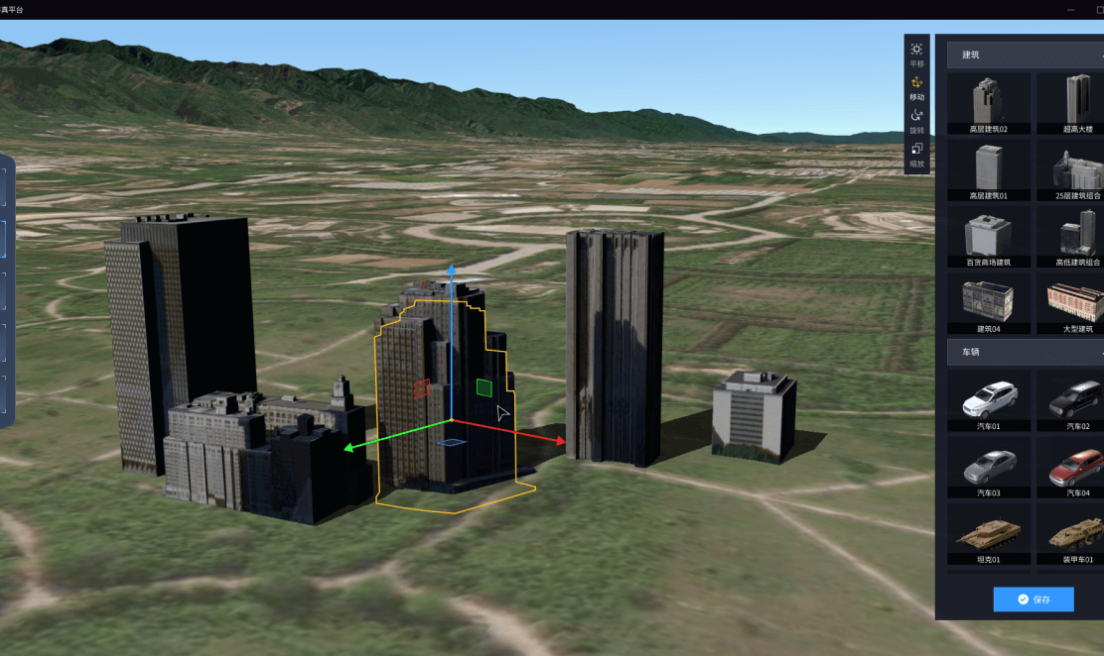
自定义场景
包含地形地景、建筑结构、风向风速的场景创建,支持模型导入,添加创建自定义任务目标
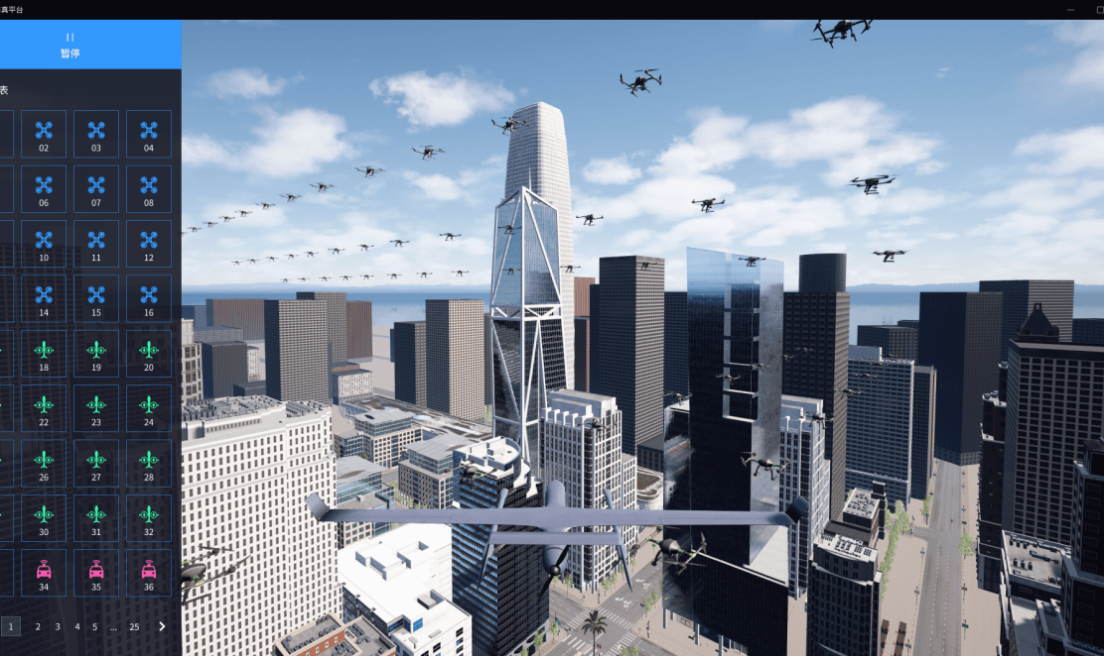
多机型协作
支持接入多台飞控,模拟多机协同作业,支持无人机、无人车、无人船等不同机型共同协作

全流程回溯
飞行器多角度观测与录制,全面分析动作细节,飞行轨迹全程录制与回放,全局策略复盘
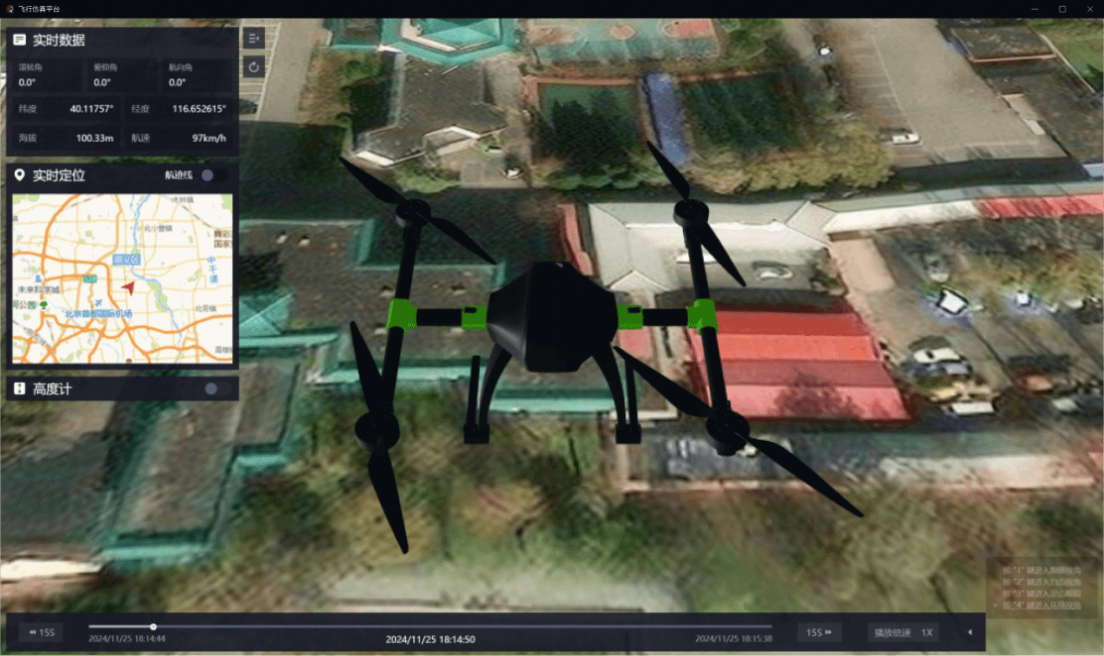
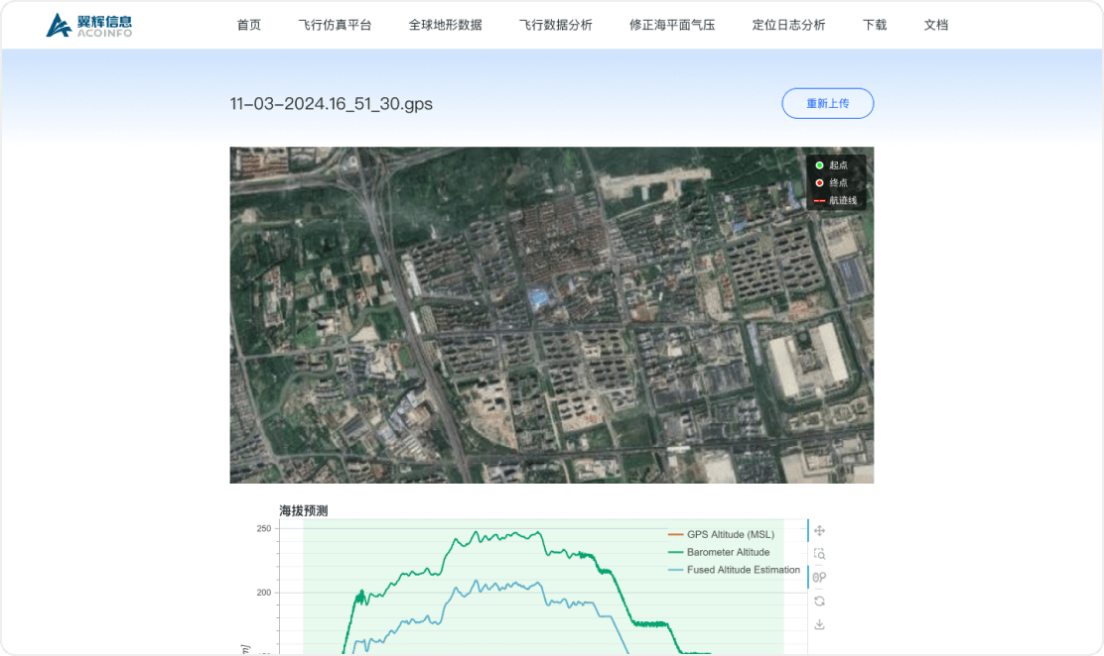
数字化评估
提供全套飞行日志分析工具,全面评估飞行性能、诊断潜在问题并优化未来飞行操作飞行模式与状态分析、PID 性能跟踪、振动水平检测、原始加速度分析、GPS 设备信息显示、3D 飞行视角再现、电机 PWM 输出、遥控输入