


 卫星及载荷制造
卫星及载荷制造

 火箭制造与发射
火箭制造与发射

 地面终端与设施
地面终端与设施

 材料与电子元器件
材料与电子元器件

 卫星应用服务
卫星应用服务

 试验、检测及其他服务
试验、检测及其他服务

 系统软件与数据
系统软件与数据

 配套工具与设备
配套工具与设备

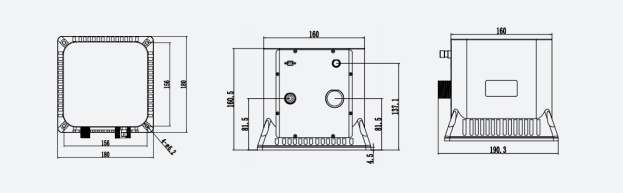
产品概述
● FN-120是一款GNSS/INS光纤陀螺捷联组合导航系统(以下简称导航系统),在独立结构内集成了惯性测量装置(IMU)以及定向型双天线GNSS接收机。FN-120采用最优估计的方法,融合了两种不同但互补的导航方式;全球导航卫星系统(GNSS)定位和惯性导航(INS)。惯性导航具有全自主,能够高频率提供稳定连续的导航信息的优点,实现一个包括卫星信号不可用等各种条件下,稳定和持续可用的三维导航解决方案。
产品特点
● 惯导采用基于管线陀螺(FOG)和石英加速度计的IMU,保证高可靠性和稳定性能;
● 在卫星信息(GNSS)不稳定或者遮挡时,仍然可以稳定连续准确的定位和姿态跟踪;
● 通过优化的双天线接收机提供高精度航向;
● 最快可输出200Hz的位置、速度以及姿态等导航信息
● 在卫星信息(GNSS)不稳定或者遮挡时,仍然可以稳定连续准确的定位和姿态跟踪;
● 可以在地面与里程计组合构成航位推算系统;
● 接口丰富,适用于各种平台;
● 自带大容量存储,可以用于高精度后处理应用。